Appearance
Layer 5 — AutoCorrelation 精读
由
AutoCorrelationLayer.forward()调用([[04-Layer4-AutoCorrelationLayer]])。
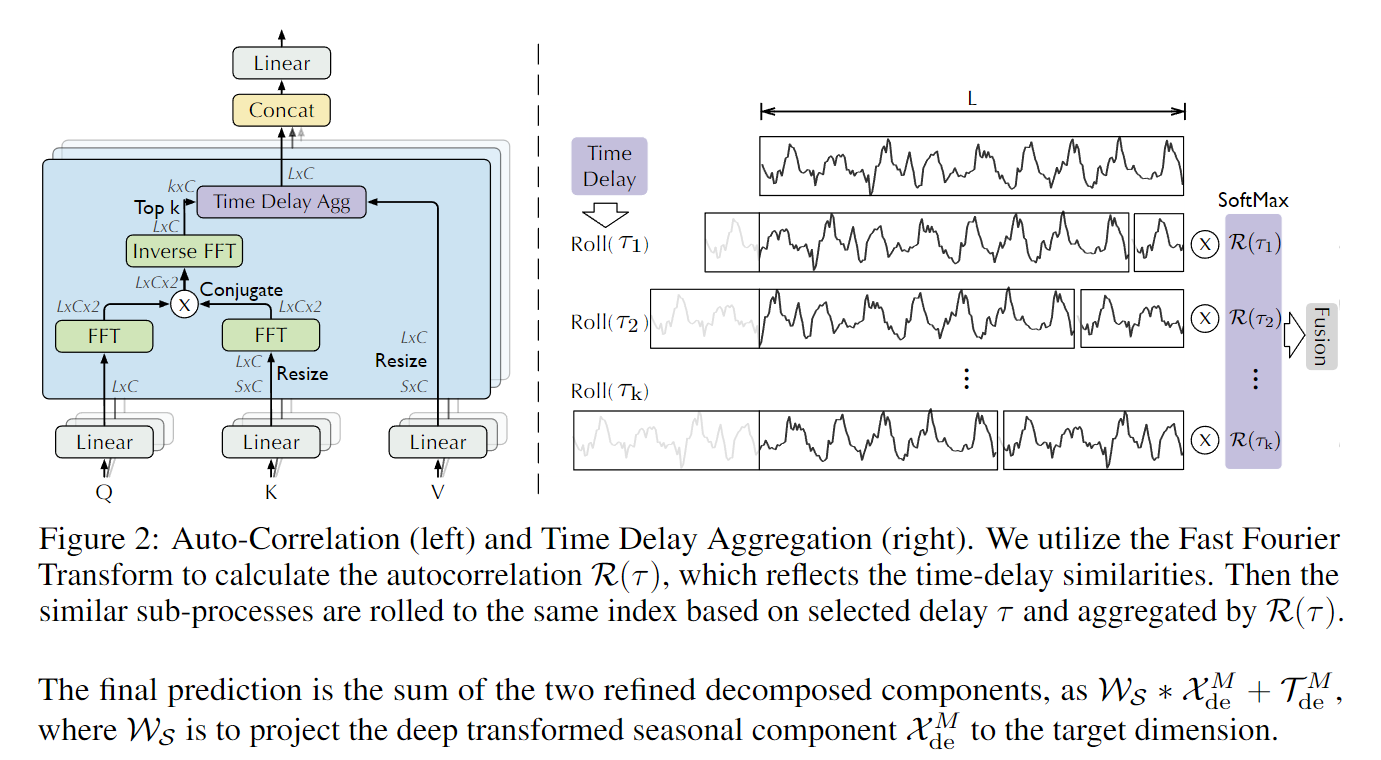
本层是 Autoformer 的核心创新:FFT 互相关发现主导 lag,时延聚合替代点积注意力。
1. 在父层中的位置
AutoCorrelationLayer.forward()
└─ self.inner_correlation(queries, keys, values, attn_mask) ← AutoCorrelation(本文档)2. I/O 接口定义
以 EncoderLayer 自注意力(toy,encoder seq_len=12)为例:
| shape | 含义 | |
|---|---|---|
输入 queries | (2, 12, 4, 2) = (B, L, H, E) | 多头 Q |
输入 keys | (2, 12, 4, 2) = (B, S, H, E) | 多头 K |
输入 values | (2, 12, 4, 2) = (B, S, H, D) | 多头 V |
输出 V | (2, 12, 4, 2) = (B, L, H, D) | 时延聚合后的上下文向量 |
输出 attn | None | output_attention=False 时为 None |
3. 顺序图(具体层)
4. 语义分组图(索引层)
5. 逐步精读
5.0 完整原始代码
python
class AutoCorrelation(nn.Module):
"""
AutoCorrelation Mechanism with the following two phases:
(1) period-based dependencies discovery
(2) time delay aggregation
This block can replace the self-attention family mechanism seamlessly.
"""
def __init__(
self,
mask_flag=True,
factor=1,
scale=None,
attention_dropout=0.1,
output_attention=False,
):
super(AutoCorrelation, self).__init__()
self.factor = factor
self.scale = scale
self.mask_flag = mask_flag
self.output_attention = output_attention
self.dropout = nn.Dropout(attention_dropout)
def forward(self, queries, keys, values, attn_mask):
B, L, H, E = queries.shape
_, S, _, D = values.shape
if L > S:
zeros = torch.zeros_like(queries[:, : (L - S), :]).float()
values = torch.cat([values, zeros], dim=1)
keys = torch.cat([keys, zeros], dim=1)
else:
values = values[:, :L, :, :]
keys = keys[:, :L, :, :]
# period-based dependencies
q_fft = torch.fft.rfft(queries.permute(0, 2, 3, 1).contiguous(), dim=-1)
k_fft = torch.fft.rfft(keys.permute(0, 2, 3, 1).contiguous(), dim=-1)
res = q_fft * torch.conj(k_fft)
corr = torch.fft.irfft(res, dim=-1)
# time delay agg
if self.training:
V = self.time_delay_agg_training(
values.permute(0, 2, 3, 1).contiguous(), corr
).permute(0, 3, 1, 2)
else:
V = self.time_delay_agg_inference(
values.permute(0, 2, 3, 1).contiguous(), corr
).permute(0, 3, 1, 2)
if self.output_attention:
return (V.contiguous(), corr.permute(0, 3, 1, 2))
else:
return (V.contiguous(), None)5.1 宏观逻辑:AutoCorrelation 的计算公式链
标准注意力的计算流水线是:
AutoCorrelation 的流水线对应地是:
下面逐段推导每一步的数学含义和实现方式。
第一步:用互相关代替点积 — 计算 corr[τ]
点积注意力
互相关函数
直觉:把 K 整体右移 τ 步,再与 Q 逐位点积求和。τ 是周期 lag,当 τ 等于序列真实周期时,移位后的 K 和 Q 完美对齐,C[τ] 取得峰值。
用一条周期=4 的信号 Q = K = [1,3,2,4, 1,3,2,4, 1,3,2,4] 验证:
τ=0: K 右移0 = [1,3,2,4,1,3,2,4,1,3,2,4] → C[0] = 1²+3²+2²+4²+... = 60
τ=1: K 右移1 = [4,1,3,2,4,1,3,2,4,1,3,2] → C[1] = 1×4+3×1+2×3+... ← 错位,值小
τ=4: K 右移4 = [1,3,2,4,1,3,2,4,1,3,2,4] → C[4] = 60(和τ=0一样!完美对齐)
τ=8: 同理 → C[8] = 60C 的峰值在 τ=0,4,8,正好是周期的整数倍。这就是 corr 张量在计算的东西:每个 τ 位置存一个"该偏移量下的全局对齐强度"。
代码里怎么算:直接按定义算要
python
q_fft = torch.fft.rfft(queries_time_major, dim=-1) # (B,H,E,L//2+1) 复数
k_fft = torch.fft.rfft(keys_time_major, dim=-1)
res = q_fft * torch.conj(k_fft) # 逐元素复数乘法
corr = torch.fft.irfft(res, n=L, dim=-1) # 还原 → (B,H,E,L) 实数rfft 利用实数信号的对称性只保留 irfft 还原时需显式传 n=L 告知目标长度。
第二步:top-k 选主周期 — 对应 softmax 之前的 score 筛选(Time Delay Agg)
得到 corr (B,H,E,L) 之后,每个 τ 都有一个相关值。直接对全部 L 个 τ 做 softmax 然后加权,代价是
代码取
python
top_k = int(self.factor * math.log(length))math.log 是自然对数 ln,ln(12) ≈ 2.48 → top_k=2。
corr 有 4 个维度 (B,H,E,L),取 top-k 时先对 H 和 E 维度求均值,得到每个 τ 的跨头、跨通道平均强度,再在 L 维度上找最大的 k 个下标:
python
mean_value = torch.mean(torch.mean(corr, dim=1), dim=1) # (B,L)
index = torch.topk(torch.mean(mean_value, dim=0), top_k, dim=-1)[1]torch.mean(mean_value, dim=0) 再对 batch 求均值 → 训练时所有样本共享同一组 top-k lag 下标(§5.4 详解)。
第三步:softmax 归一化 — 把互相关值变成权重(Time Delay Agg)
选出 top-k 个 lag 对应的 corr 值,softmax 归一化得到加权系数:
对应点积注意力里的
python
tmp_corr = torch.softmax(torch.stack([...], dim=-1), dim=-1) # (B, top_k)第四步:roll(V, -τ) 加权叠加 — 对应 α·V(Time Delay Agg)
点积注意力的聚合:
对每个 query 位置 t 单独算一行权重,再加权 V。这是"逐位置"聚合,输出的每个时间步看的是不同的 V 子集。
AutoCorrelation 的聚合:
roll(V, -τ) 是循环左移:位置 t 上的值变成原来的
为什么是 roll 而不是 gather 特定位置:互相关发现"lag=τ 时整条序列对齐",意味着对每一个时间步 t,需要聚合的不是某个固定位置 j,而是"当前位置 t 的 τ 步之后"——即
展开 Out[t] 的含义:
每个时间步 t 聚合的是"在主周期 τ_k 步之后的 V 向量"——利用的是时序的周期重复性,而非任意两位置间的语义相似性。
完整公式对照
| 步骤 | 标准注意力 | AutoCorrelation |
|---|---|---|
| 相似度计算 | ||
| 筛选 | 无筛选,全部 L² 个得分 | top-k:保留 |
| 归一化 | ||
| 聚合 |
shape 变化链:
Q, K, V 输入:(B,L,H,E) = (2,12,4,2)
→ permute(0,2,3,1) → (2,4,2,12)
→ rfft(dim=-1) → (2,4,2,7) 复数,L//2+1=7
→ q_fft × conj(k_fft) → (2,4,2,7) 逐元素复数乘法
→ irfft(n=12) → corr (2,4,2,12) 每个 τ 的互相关值
→ 均值+topk → index (top_k=2,) lag 下标
→ softmax → w (2,2) lag 权重
→ roll(V)+加权叠加 → Out (2,12,4,2)math.log 为自然对数 ln(非 log₂),ln(12) ≈ 2.48 → int() 截断 → top_k=2。
5.2 步骤一:L/S 对齐
python
if L > S:
zeros = torch.zeros_like(queries[:, : (L - S), :]).float()
values = torch.cat([values, zeros], dim=1)
keys = torch.cat([keys, zeros], dim=1)
else:
values = values[:, :L, :, :]
keys = keys[:, :L, :, :]FFT 互相关要求 Q 和 K/V 的序列长度一致。
| 场景 | L vs S | 处理 |
|---|---|---|
| Encoder 自注意力 | L=S=12 | else: values[:, :12, :, :](无变化) |
| Decoder cross-attn | L=10 < S=12 | else: values[:, :10, :, :](截断 K/V 到 L) |
| L > S(少见) | L > S | 对 K/V 末尾补零 |
cross-attention 截断后:keys/values 变为 (2, 10, 4, 2),FFT 在 L=10 维度上计算。
toy 数值:Encoder 自注意力 L=S=12,无操作。
5.3 Phase 1 — FFT 周期发现
python
q_fft = torch.fft.rfft(queries.permute(0, 2, 3, 1).contiguous(), dim=-1)
k_fft = torch.fft.rfft(keys.permute(0, 2, 3, 1).contiguous(), dim=-1)
res = q_fft * torch.conj(k_fft)
corr = torch.fft.irfft(res, dim=-1)permute 解析:queries (B,L,H,E) → permute(0,2,3,1) → (B,H,E,L) = (2,4,2,12)
FFT 作用在最后一维(L=12),对每个 (b,h,e) 的长度12序列做变换。
rfft vs fft:
实数输入的 FFT 输出关于中心频率共轭对称。rfft 只返回非冗余的前半部分:L//2+1 = 7 个复数。
互相关:
这正是互相关定理:时域互相关 ↔ 频域共轭乘积。

toy 数值 — 最小示例(L=8)逐步推导
以下用 L=8 的短序列说明 FFT 互相关的具体计算;实际 toy 为 L=12,步骤相同,只是规模更大。
设 batch=0, head=0, e=0 的单条序列:q = k = [1, 0, 0, 0, 1, 0, 0, 0](脉冲间隔=4,周期 p=4)
Step 1:rfft — 实数 FFT,输出 L//2+1 = 5 个复数
非零项只有 t=0 和 t=4:
| f | q_fft[f] | |
|---|---|---|
| 0 | +1 | 2+0j |
| 1 | −1 | 0+0j |
| 2 | +1 | 2+0j |
| 3 | −1 | 0+0j |
| 4 | +1 | 2+0j |
f=2 处有能量,对应周期
Step 2:res = q_fft × conj(k_fft)(自注意力 Q=K)
Step 3:irfft(res, n=8) → corr,形状还原为 (L=8,)
irfft 补全对称频谱
只有 k=0,2,4,6 非零(均为4),故
| τ | corr[τ] | 解读 |
|---|---|---|
| 0 | 2 | lag=0:序列与自身完全对齐,最大正相关 |
| 1 | 0 | 无相关 |
| 2 | 0 | 无相关 |
| 3 | 0 | 无相关 |
| 4 | 2 | lag=4:移位一个完整周期 p=4 后完全对齐 ✓ |
| 5–7 | 0 | 无相关 |
top_k =
对照实际 toy L=12:rfft 输出 (2,4,2,12),每个 [b,h,e,τ] 位置表示延迟 τ 步后 Q 与 K 的互相关强度。
5.4 Phase 2 — 时延聚合(training 路径)
python
def time_delay_agg_training(self, values, corr):
head = values.shape[1]
channel = values.shape[2]
length = values.shape[3]
# find top k
top_k = int(self.factor * math.log(length))
mean_value = torch.mean(torch.mean(corr, dim=1), dim=1)
index = torch.topk(torch.mean(mean_value, dim=0), top_k, dim=-1)[1]
weights = torch.stack([mean_value[:, index[i]] for i in range(top_k)], dim=-1)
# update corr
tmp_corr = torch.softmax(weights, dim=-1)
# aggregation
tmp_values = values
delays_agg = torch.zeros_like(values).float()
for i in range(top_k):
pattern = torch.roll(tmp_values, -int(index[i]), -1)
delays_agg = delays_agg + pattern * (
tmp_corr[:, i]
.unsqueeze(1)
.unsqueeze(1)
.unsqueeze(1)
.repeat(1, head, channel, length)
)
return delays_agg此处 values 已经是 permute 后的格式
调用处:
values.permute(0, 2, 3, 1).contiguous()
所以传入time_delay_agg_training的values是(B, H, D, L) = (2, 4, 2, 12),head=4, channel=2, length=12。
toy 输入定义
corr 是 Phase 1 的输出,shape (B, H, E, L) = (2, 4, 2, 12)。为简化追踪,设所有 head 和 channel 共享相同的 lag 强度曲线(batch 间不同):
# batch=0:lag=2 主导,lag=5 次之
corr[0, h, e, :] = [0.20, 0.10, 2.40, 0.10, 0.20, 1.60, 0.10, 0.20, 0.10, 0.10, 0.10, 0.10]
τ=0 τ=1 τ=2 τ=3 τ=4 τ=5 τ=6 τ=7 τ=8 τ=9 τ=10 τ=11
# batch=1:lag=2 主导,lag=7 次之
corr[1, h, e, :] = [0.20, 0.10, 2.00, 0.10, 0.10, 0.20, 0.10, 1.80, 0.10, 0.10, 0.10, 0.10]values[0, 0, 0, :] = [0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6](追踪切片)
Step 1 — 两次均值:corr → mean_value
python
mean_value = torch.mean(torch.mean(corr, dim=1), dim=1)第一次 torch.mean(corr, dim=1):对 H=4 个 head 求均值。
由于各 head 值相同,均值不变:
结果[0, e, :] = [0.20, 0.10, 2.40, 0.10, 0.20, 1.60, 0.10, 0.20, 0.10, 0.10, 0.10, 0.10] (e=0,1)
结果[1, e, :] = [0.20, 0.10, 2.00, 0.10, 0.10, 0.20, 0.10, 1.80, 0.10, 0.10, 0.10, 0.10] (e=0,1)第二次 torch.mean(..., dim=1):对 E=2 个 channel 求均值(此时 dim=1 对应 E 维)。
由于两个 channel 值相同,均值仍不变:
mean_value[0, :] = [0.20, 0.10, 2.40, 0.10, 0.20, 1.60, 0.10, 0.20, 0.10, 0.10, 0.10, 0.10]
mean_value[1, :] = [0.20, 0.10, 2.00, 0.10, 0.10, 0.20, 0.10, 1.80, 0.10, 0.10, 0.10, 0.10]mean_value[b, τ] = 样本 b 在延迟 τ 时的平均互相关强度(已跨所有 head 和 channel 压缩)。
Step 2 — batch 均值 → topk:全局共享 index
python
index = torch.topk(torch.mean(mean_value, dim=0), top_k, dim=-1)[1]torch.mean(mean_value, dim=0):在 B=2 维求均值,(2,12) → (12,):
τ=0: (0.20+0.20)/2 = 0.20
τ=1: (0.10+0.10)/2 = 0.10
τ=2: (2.40+2.00)/2 = 2.20 ← 最大
τ=3: 0.10
τ=4: (0.20+0.10)/2 = 0.15
τ=5: (1.60+0.20)/2 = 0.90
τ=6: 0.10
τ=7: (0.20+1.80)/2 = 1.00 ← 第二大
τ=8~11: 0.10torch.topk(k=2)[1] 取下标 → index = tensor([2, 7])
这里体现了 Training 的"batch-norm 风格"代价
batch=0 自己最偏好的 top-2 是 [τ=2, τ=5](2.40, 1.60);
batch=1 自己最偏好的 top-2 是 [τ=2, τ=7](2.00, 1.80)。
训练时批量平均后选出 [τ=2, τ=7],batch=0 被迫放弃 τ=5、接受 τ=7(对它只有 0.20 的相关强度)。
Inference 路径用per-sample topk避免了这个问题(见 §5.5)。
Step 3 — 取出每个样本在选中 lag 处的相关强度:weights
python
weights = torch.stack([mean_value[:, index[i]] for i in range(top_k)], dim=-1)逐步展开:
mean_value[:, index[0]] = mean_value[:, 2]:取第2列(τ=2 的相关强度)
mean_value[:, index[1]] = mean_value[:, 7]:取第7列(τ=7 的相关强度)
torch.stack([..., ...], dim=-1):在最后维度拼叠两个 (2,) → (2, 2)
weights[b, i] = 样本 b 在第 i 个选中 lag 处的互相关强度。
Step 4 — softmax 归一化:tmp_corr
python
tmp_corr = torch.softmax(weights, dim=-1)对 top_k 维(dim=-1)做 softmax,
batch=0,原始 [2.40, 0.20]:
batch=1,原始 [2.00, 1.80]:
Step 5 — roll + 加权累加
python
for i in range(top_k):
pattern = torch.roll(tmp_values, -int(index[i]), -1)
delays_agg = delays_agg + pattern * (
tmp_corr[:, i].unsqueeze(1).unsqueeze(1).unsqueeze(1).repeat(1, head, channel, length)
)广播展开详解(以 i=0 为例)
先明确问题:pattern 是 (2, 4, 2, 12),而权重 tmp_corr[:, 0] 是 (2,),形状不匹配,无法直接相乘。需要把 (2,) 扩成 (2, 4, 2, 12) 且保证 batch 维对齐。
tmp_corr[:, 0] = [0.90, 0.55],其中 0.90 属于 batch=0,0.55 属于 batch=1。
[0.90, 0.55] shape (2,) ← 1维,只有 B 轴
↓ .unsqueeze(1) 在 dim=1 插入大小为1的新轴
[[0.90], shape (2, 1) ← 2维:(B, 1)
[0.55]]
↓ .unsqueeze(1) 再在 dim=1 插入
[[[0.90]], shape (2, 1, 1) ← 3维:(B, 1, 1)
[[0.55]]]
↓ .unsqueeze(1) 再在 dim=1 插入
[[[[0.90]]], shape (2, 1, 1, 1) ← 4维:(B, 1, 1, 1)
[[[0.55]]]]
现在维度数与 pattern (2, 4, 2, 12) 相同,
但后三个轴大小是 1,还需扩展到 (4, 2, 12)
↓ .repeat(1, 4, 2, 12)
dim=0 重复 1 次 → 2 (B 轴不动)
dim=1 重复 4 次 → 4 (H 轴:1→4)
dim=2 重复 2 次 → 2 (D 轴:1→2)
dim=3 重复 12 次 → 12 (L 轴:1→12)
shape (2, 4, 2, 12):
weight[0, h, d, t] = 0.90 (batch=0 的所有 4×2×12 = 96 个位置)
weight[1, h, d, t] = 0.55 (batch=1 的所有 4×2×12 = 96 个位置)然后逐元素乘法 pattern * weight:
pattern[0, 0, 0, :] = [0.5, 0.2, 0.4, 0.6, 0.1, 0.3, ...] (roll(-2) 结果)
weight [0, 0, 0, :] = [0.90, 0.90, 0.90, 0.90, ...] (同一 batch 全部相同)
乘积 [0, 0, 0, :] = [0.45, 0.18, 0.36, 0.54, ...]
pattern[1, 0, 0, :] = [...各 head/channel 有各自的 roll 结果...]
weight [1, 0, 0, :] = [0.55, 0.55, 0.55, 0.55, ...]delays_agg 循环累加过程(batch=0, head=0, d=0):
初始: delays_agg[0,0,0,:] = [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
i=0 后: delays_agg[0,0,0,:] += roll(-2) × 0.90
= [0.45, 0.18, 0.36, 0.54, 0.09, 0.27, 0.45, 0.18, 0.36, 0.54, 0.09, 0.27]
i=1 后: delays_agg[0,0,0,:] += roll(-7) × 0.10
roll(-7) = [0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1]
×0.10 = [0.03, 0.05, 0.02, 0.04, 0.06, 0.01, 0.03, 0.05, 0.02, 0.04, 0.06, 0.01]
最终: delays_agg[0,0,0,:] = [0.480, 0.230, 0.380, 0.580, 0.150, 0.280, ...]
↑t=0 ↑t=1 ↑t=2 ↑t=3逐 lag 追踪(batch=0, head=0, d=0):
values[0, 0, 0, :] = [0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6]
i=0,τ=2,weight=0.90:
roll(-2): [0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3]
↑ 原索引2起始,末尾两位 0.1,0.3 循环补到队首i=1,τ=7,weight=0.10:
roll(-7): [0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1]
↑ 原索引7起始,0~6共7位循环补到末尾加权求和(前4个位置):
| t | roll(-2) | ×0.90 | roll(-7) | ×0.10 | delays_agg |
|---|---|---|---|---|---|
| 0 | 0.5 | 0.450 | 0.3 | 0.030 | 0.480 |
| 1 | 0.2 | 0.180 | 0.5 | 0.050 | 0.230 |
| 2 | 0.4 | 0.360 | 0.2 | 0.020 | 0.380 |
| 3 | 0.6 | 0.540 | 0.4 | 0.040 | 0.580 |

上图以 top_k=3 为例示意 roll 操作和 wrap-around 机制;实际 L=12 时 top_k=⌊ln(12)⌋=2,仅选 2 个 lag 进行聚合。
Step 6 — 输出 permute 还原
delays_agg (B,H,D,L) = (2,4,2,12) → .permute(0,3,1,2) → (B,L,H,D) = (2,12,4,2) → 作为 V 返回。
5.5 Phase 2 — 时延聚合(inference 路径对比)
python
def time_delay_agg_inference(self, values, corr):
batch = values.shape[0]
head = values.shape[1]
channel = values.shape[2]
length = values.shape[3]
# index init
init_index = (
torch.arange(length)
.unsqueeze(0)
.unsqueeze(0)
.unsqueeze(0)
.repeat(batch, head, channel, 1)
.cuda()
)
# find top k
top_k = int(self.factor * math.log(length))
mean_value = torch.mean(torch.mean(corr, dim=1), dim=1)
weights, delay = torch.topk(mean_value, top_k, dim=-1)
# update corr
tmp_corr = torch.softmax(weights, dim=-1)
# aggregation
tmp_values = values.repeat(1, 1, 1, 2)
delays_agg = torch.zeros_like(values).float()
for i in range(top_k):
tmp_delay = init_index + delay[:, i].unsqueeze(1).unsqueeze(1).unsqueeze(
1
).repeat(1, head, channel, length)
pattern = torch.gather(tmp_values, dim=-1, index=tmp_delay)
delays_agg = delays_agg + pattern * (
tmp_corr[:, i]
.unsqueeze(1)
.unsqueeze(1)
.unsqueeze(1)
.repeat(1, head, channel, length)
)
return delays_agg沿用 §5.4 相同的 corr 和 values 设定,逐步追踪 inference 路径与 training 的差异。
Step 1 — mean_value(与 training 完全相同)
python
mean_value = torch.mean(torch.mean(corr, dim=1), dim=1)结果与 §5.4 Step 1 完全一致:
mean_value[0, :] = [0.20, 0.10, 2.40, 0.10, 0.20, 1.60, 0.10, 0.20, 0.10, 0.10, 0.10, 0.10]
mean_value[1, :] = [0.20, 0.10, 2.00, 0.10, 0.10, 0.20, 0.10, 1.80, 0.10, 0.10, 0.10, 0.10]Step 2 — 差异开始:per-sample topk
python
weights, delay = torch.topk(mean_value, top_k, dim=-1)torch.topk 作用在 dim=-1(L 维),对 每个样本独立 找 top-2:
mean_value (2, 12) → torch.topk(k=2, dim=-1)
→ weights (2, 2) delay (2, 2)batch=0 的 12 个 lag 值里 top-2:τ=2(2.40)、τ=5(1.60)
batch=1 的 12 个 lag 值里 top-2:τ=2(2.00)、τ=7(1.80)
与 training 的根本区别就在这一行
Training 先
mean(dim=0)把两个 batch 压缩成一个(12,)向量再 topk,结果是index=[2,7](batch 平均的 top-2)。
Inference 直接对mean_value (2,12)做 topk,每行独立选,delay[0]=[2,5],delay[1]=[2,7]——两个 batch 用不同的 lag 集。
Step 3 — softmax(仍是 per-sample)
python
tmp_corr = torch.softmax(weights, dim=-1)batch=0,原始 [2.40, 1.60]:
batch=1,原始 [2.00, 1.80]:与 training 相同 →
Step 4 — init_index 构造
python
init_index = (
torch.arange(length) # [0,1,2,...,11] shape (12,)
.unsqueeze(0) # shape (1, 12)
.unsqueeze(0) # shape (1, 1, 12)
.unsqueeze(0) # shape (1, 1, 1, 12)
.repeat(batch, head, channel, 1) # shape (2, 4, 2, 12)
)所有 (b, h, d, t) 位置的值就是 t 本身:
init_index[b, h, d, :] = [0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11] 对任意 b,h,dStep 5 — tmp_values 拼接
python
tmp_values = values.repeat(1, 1, 1, 2) # (2,4,2,12) → (2,4,2,24)tmp_values[0,0,0,:] = [0.1,0.3,0.5,0.2,0.4,0.6,0.1,0.3,0.5,0.2,0.4,0.6,
0.1,0.3,0.5,0.2,0.4,0.6,0.1,0.3,0.5,0.2,0.4,0.6]
|←────────── 原序列 ──────────→|←────── 复制一遍 ──────→|
索引 0..11 索引 12..23Step 6 — for 循环:每个 lag 独立处理(关键差异在 delay 是 per-sample)
python
for i in range(top_k):
tmp_delay = init_index + delay[:, i].unsqueeze(1).unsqueeze(1).unsqueeze(1).repeat(1, head, channel, length)
pattern = torch.gather(tmp_values, dim=-1, index=tmp_delay)
delays_agg = delays_agg + pattern * (tmp_corr[:, i].unsqueeze(1).unsqueeze(1).unsqueeze(1).repeat(...))i=0(两个 batch 均用 τ=2,与 training 相同):
delay[:, 0] = [2, 2] shape (2,) → unsqueeze×3 → (2,1,1,1) → repeat → (2,4,2,12): 所有 batch 均填 2。
tmp_delay[b, h, d, t] = t + 2 → [2,3,4,...,13] (对所有 b,h,d)gather(tmp_values, index=tmp_delay):取下标 2..13 位置的值:
pattern[0,0,0,:] = tmp_values[0,0,0, 2:14]
= [0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3]等价于 roll(-2) ✓
i=1(关键差异:delay[:,1] = [5, 7],两个 batch 不同):
delay[:, 1] = [5, 7] → unsqueeze×3 → (2,1,1,1) → repeat → (2,4,2,12):
batch=0 的所有 (h,d,t) 位置填 5
batch=1 的所有 (h,d,t) 位置填 7tmp_delay[0, h, d, t] = t + 5 → [5,6,7,...,16]
tmp_delay[1, h, d, t] = t + 7 → [7,8,9,...,18]gather 取各自下标对应的值:
pattern[0,0,0,:] = tmp_values[0,0,0, 5:17]
= [0.6, 0.1, 0.3, 0.5, 0.2, 0.4, 0.6, 0.1, 0.3, 0.5, 0.2, 0.4]
等价于 roll(-5) ✓
pattern[1,0,0,:] = tmp_values[1,0,0, 7:19]
等价于 roll(-7) ✓batch=0 的最终结果(head=0, d=0):
| t | i=0: roll(-2)×0.69 | i=1: roll(-5)×0.31 | delays_agg |
|---|---|---|---|
| 0 | 0.5×0.69=0.345 | 0.6×0.31=0.186 | 0.531 |
| 1 | 0.2×0.69=0.138 | 0.1×0.31=0.031 | 0.169 |
| 2 | 0.4×0.69=0.276 | 0.3×0.31=0.093 | 0.369 |
Training vs Inference 数值对比(batch=0, t=0):
| 路径 | 使用的 lag 集 | t=0 的权重 | t=0 结果 |
|---|---|---|---|
| Training | [τ=2, τ=7] | [0.90, 0.10] | 0.90×0.5+0.10×0.3 = 0.480 |
| Inference | [τ=2, τ=5] | [0.69, 0.31] | 0.69×0.5+0.31×0.6 = 0.531 |
Training 强迫 batch=0 用 τ=7(自身相关强度仅 0.20),Inference 用 batch=0 真正偏好的 τ=5(相关强度 1.60),结果更贴近该样本自身的周期特征。
gather 为什么比 roll 更适合 inference
Training 用
roll是因为所有样本共享同一个 τ,整个 batch 统一移位,简单高效。
Inference 每个样本有自己的 τ(delay (B, top_k)),若用 roll 需要逐样本循环;用[V|V] + gather则可以向量化:构造tmp_delay (B,4,2,12)(每个样本的偏移已经 embed 进 index 里),一次 gather 完成所有样本的不同移位。